David ANDRY – Christophe RAFFIN
DESS Communications mobiles 2001/2002
Responsable : M.
Bertrand BONTE
INTRODUCTION
Actuellement, l’importance de la partie radio-fréquence
du terminal mobile est évidente. En effet, elle représente la moitié du coût et
du nombre de composants du terminal. Par ailleurs, étant donné la diversité des
standards utilisés dans les radiocommunications mobiles (UMTS, GSM 900, DCS 1800
, IS-95…), le besoin en terminaux multi-normes et multi-standards apparaît. De ce fait, des efforts
s’orientent vers une tête RF universelle.
L’une des solutions est la suivante : créer des
interfaces radio entièrement re-programmables et qui, selon l’environnement, se configurent dans la norme exigée. Des
recherches actuelles portent sur des circuits RF entièrement re-configurables.
En effet, la propriété de re-configuration se fait à l’aide de composants comme
des capacités variables. L’implémentation de tels composants permet un certain
degrés de liberté dans les fonctions RF.
Cependant, une autre alternative devient de plus en
plus intéressante. Il s’agit de la
radio logicielle. Son concept consiste à numériser le signal RF au plus prés
de l’antenne et à faire réaliser les fonctions de l’interface radio par des
processeurs de traitement du signal. On parlera plus couramment de software
radio. Cette technique offre de véritables perspectives de terminaux mobiles
universels.
Dans un premiers
temps, nous nous efforcerons de présenter la partie RF d’un mobile actuel et
ainsi d’énoncer les limitations d’une telle architecture face aux prochains
enjeux. Puis, nous présenterons des alternatives énoncées précédemment.
1.
Fonctionnalités
et rôle de la partie RF :
Dans cette partie, nous
décrirons les différentes composantes de la structure RF de base. Puis nous
présenterons une architecture plus spécifique au mobile, c’est à dire celle
d’un terminal GSM bi-bande 900-1800.
1.1 Principe d’émission et de réception RF :
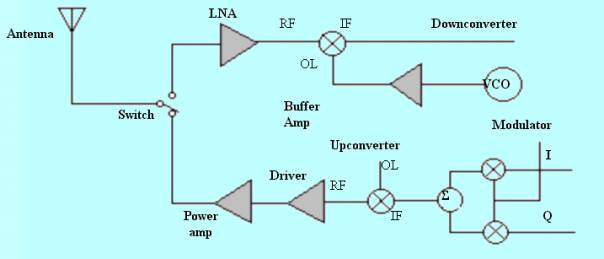
Fig. 1 : Schéma
de base d’un système émission/réception RF.
En premier
lieu, on remarque que l’antenne est utilisée en émission et en réception. De
plus, à cause du switch, l’émission
et la réception ne peuvent être simultanées.
En réception,
l’amplificateur LNA est là pour
apporter une première amplification
du signal et compenser toute les pertes d’insertions aux connexions depuis
l’antenne. De plus, il doit limiter l’effet du bruit sur la chaîne de
réception. Le mélangeur du circuit permet de faire la transposition en fréquence
(« downconverter ») des
signaux reçus vers la fréquence intermédiaire. Cette opération se fait à l’aide
du VCO ( Oscillateur local ).
En
émission, après production des porteuses I
et Q, on module le signal à l’aide
du signal d’information (modulator).
Puis on effectue une transposition de fréquence vers la fréquence RF. Cette transposition est réalisée à
l’aide du mélangeur (« upconverter »).
Ensuite, le signal RF obtenu est amplifié pour être envoyé vers l’antenne.
Cependant,
ce schéma est idéal et des applications telles que le système GSM nécessitent
une architecture plus complexe (filtres, contrôle de puissance…)
1.2 Une architecture plus complexe : le GSM bi-bande.
A
présent, nous allons décrire différents problèmes auxquels nous sommes
confrontés dans un système multi-bandes. Pour cela, nous allons prendre
l’exemple d’un terminal mobile GSM 900 – DCS 1800 [1].
a)
Problème de la fréquence image.
La structure précédente, idéale,
présente un inconvénient. En effet, 2 émetteurs peuvent être reçus pour une
valeur donnée de l’oscillateur local Fo. Par exemple, si on veut recevoir une
émission de la station de base à F1=935.2 Mhz, on réglera la fréquence du VCO à
Fo = 1375.2 Mhz. Malheureusement, la fréquence F’1=Fo+Fi = 1815.2 Mhz (Fi =
fréquence intermédiaire) mélangée à 1375.2 Mhz tombera aussi à 440 Mhz. Cette
deuxième fréquence F’1 est appelée
fréquence image de F1. On voit que l’émetteur est séparé de son image par
un intervalle égal à 2 Fi.
Pour résoudre ce problème, il est nécessaire
de placer des filtres de bande entre
l’antenne et le mélangeur. Ces filtres sont des filtres à ondes de surface (
FOS ou Surface Acoustic Wave ).
Pour un système bi-bandes, deux
filtres sont nécessaires. Ces deux filtres sont de technologie différente :
FOS pour le GSM 900 et filtre céramique pour le DCS 1800.
b) le
contrôle de puissance.
Deux raisons expliquent le contrôle de
puissance :
·
En émission, la station de base régule la puissance à
une valeur juste suffisante pour une liaison sans erreur et une consommation
minimale du mobile.
·
En début et fin d’émission, la forme de la montée et de
la descente de puissance est contrôlée par le circuit de gestion du mobile,
pour un encombrement spectral minimal.
Dans le mobile, ce contrôle
s’effectue d’une part à l’aide de coupleurs qui prélèvent une partie de la
puissance émise, et donc jouent le rôle de capteur dans la boucle de
régulation. D’autre part, cette puissance prélevée est comparée à une consigne
donnée par le circuit de contrôle de puissance. En fonction de l’écart entre la
consigne et la mesure, on régule la puissance des amplificateurs d’émission.
c) le modulateur GMSK.
Le modulateur GMSK se trouve physiquement :
·
Pour moitié dans le circuit de traitement numérique
(DSP) qui effectue tous les traitements allant du codage de la voix jusqu’au
calcul des signaux I et Q.
·
Pour moitié dans le circuit RF qui produit les
porteuses GSM et DCS modulées.
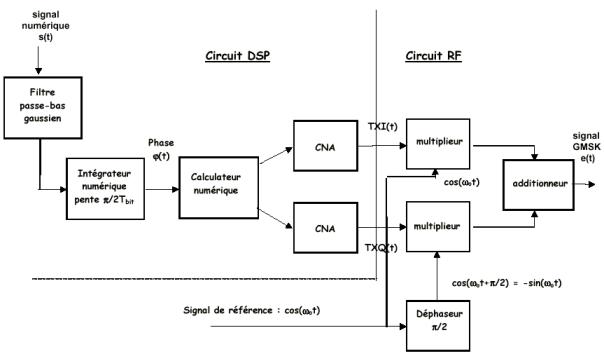
Fig. 2 : Le modulateur GSMK complet.
Le circuit RF utilise un signal
de référence (porteuse) modulé par les voies I et Q (cf. fig. 2). La production
de cette porteuse nécessite beaucoup de circuits électroniques ( plusieurs PLL
sont utilisées dans le GSM).
1.3 Conclusion.
On
remarque que la structure d’un terminal bi-bandes GSM-DCS est beaucoup plus
complexe que le schéma idéal d’un émetteur/récepteur RF. En effet, en
raison des problèmes dût aux contraintes de transmission mobile, beaucoup de
paramètres doivent être pris en compte dans la chaîne RF.
Ces
différentes contraintes induisent des terminaux avec beaucoup de composants
électroniques et offrent donc des architectures très rigides. En effet, des
circuits RF sont spécifiques à une norme et ne peuvent aucunement évoluer vers
d’autres standards et d’autres bandes.
Par
conséquent, pour répondre aux enjeux d’un mobile universel, il faudra
nécessairement rendre cette tête RF plus souple et trouver d’autres
technologies adéquates à cette demande.
On
pourrait entrevoir des composants reprogrammables, capables d’évoluer selon la
norme utilisée tels que les MEMS composants (MEMS : Micro Electro
Mechanical).
2.
1ere Solution :
Les composants reprogrammables :
Nous avons vu précédemment le manque d’adaptabilité de la partie RF
d’un mobile GSM actuel. Pour pallier à cette faiblesse, l’une des solutions
envisageables est de reprogrammer les composants « physiques » déjà
implantés. Andreas KAISER, chercheur à l’IEMN, nous propose une architecture
utilisant cette technologie. Ces composants se nomment MEMS [2].
2.1
Exemples de composants MEMS :
·
Les capacités
variables :

Fig. 3 : Schéma d’une capacité variable
Le principe est d’appliquer une tension variable Vdc sur le condensateur
dont la plaque supérieure est reliée à 2 ressorts mécaniques. Cette différence
de potentiel induit une variation de la distance entre les deux plaques, ce qui
entraîne une variation de la valeur de la capacité. Cette valeur peut atteindre
150% de la valeur nominale Co (Capacité sans application de tension Vdc).
·
Les RF
switches :
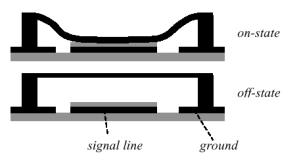
Fig. 4 : Schéma de principe d’un
micro-switch capacitif
Ces composants peuvent être
soit ohmiques, soit capacitifs. Le principe de fonctionnement est proche de
celui d’une capacité variable. La valeur de la capacité prend l’une des 2
valeurs fixées Con et Coff (interrupteur fermé et ouvert) suivant la tension de
commande appliquée au condensateur.
·
Inductance
variable :
Pour ce type de composants, il est plus difficile de faire varier la
valeur de la self. En effet, pour modifier cette valeur il faut soustraire ou ajouter
des spires, ce qui est beaucoup plus complexe que les techniques précédentes.
Cependant, des recherches sont en court.
2.2 Architecture Radio utilisant les composants
MEMS :
Nous
allons voir une association de ces différents composants reprogrammables dans
une application de type récepteur multi-standards RF (cf. Annexe).
Dans cette
architecture, certains paramètres peuvent donc être configurés. Les inductances
et les capacités variables sont utilisées pour faire varier la fréquence
centrale des filtres et la fréquence d’oscillation des VCO. Les micro-switches
RF sont utilisés pour acheminer le signal dans les différents blocs
correspondant aux traitements désirés.
2.3 Conclusion :
Bien
que cette technologie réponde à l’aspect multi-standards recherché, le coût, la
fabrication, le design et l’assemblage restent à optimiser pour une application
grand public. En effet, ces composants n’existent qu’en laboratoire.
3.
2ème
solution : Le software radio :
Pour pallier aux
inconvénients des composants reprogrammables (coût, design, fabrication…), une
des alternatives est de remplacer les composants discrets par des traitements
numériques, ces traitements numériques étant facilement modifiables et
reprogrammables. Nous n’étudierons que les récepteurs en radio logicielle,
l’émission reprenant le même principe que la réception [3].
3.1 Le récepteur Soft radio idéal :
Fig. 5 : Principe d’un récepteur Soft
RF idéal.
Dès
réception du signal par l’antenne, celui-ci est amplifié par un ampli faible
bruit puis filtré afin d’atténuer tout les signaux parasites. Ensuite, il est
aussitôt numérisé par un convertisseur analogique/numérique de cadence égale à
100 millions d’échantillons par seconde. Les mots obtenus sont traités par un
DSP.
On
peut donc constater que le but d’une telle architecture est de numériser le
signal le plus près possible de l’antenne. Ainsi, certains composants de la
tête RF très rigides comme le mélangeur disparaissent. Les opérations de
filtrage s’opèrent à l’aide de traitements numériques de l’information.
Cependant,
un tel système est utopique car des problèmes techniques apparaissent. En
effet, pour travailler sur différentes normes et différentes bandes,
l’amplificateur faible bruit et le filtre doivent fonctionner en large bande.
De plus, pour échantillonner des signaux allant jusque 2,5 Ghz (UMTS,
Bluetooth…), la fréquence d’échantillonnage devrait être de 5 Ghz (cf. théorème
de Shannon). Aussi, l’ensemble des signaux réceptionnés impliquent une grande
dynamique du convertisseur. Cette contrainte est satisfaite grâce aux
convertisseurs actuels mais dans une certaine bande de fréquence, ce qui limite
l’utilisation universelle d’un tel système.
La
solution envisagée est, d’une part réduire la bande passante à numériser et
d’autre part diminuer la fréquence de travail en passant par une fréquence
intermédiaire. Cette alternative est plus couramment appelée « software
defined radio » (radio logicielle restreinte).
3.2 Une architecture plus faisable : le software
defined radio :
Fig. 6 : Un récepteur radio logicielle
faisable.
Ce
récepteur fonctionne sur une bande moins large (quelques dizaines de Mhz) que le
récepteur idéal, à cause de l’utilisation d’un filtre image. En effet, on ne
numérise plus le signal au plus près de l’antenne, mais après un mélangeur qui
permet de transposer le signal dans une bande intermédiaire. Le début de la
chaîne ressemble donc à celui d’une chaîne RF « classique ».
Le fait
de baisser la fréquence d’échantillonnage permet d’utiliser les convertisseurs
actuels. La charge d’information à traiter par le DSP s’en trouve grandement
diminuée.
Le filtre
passe bande suivant le mélangeur joue le même rôle que dans la chaîne idéale.
Le « digital front end » est la partie maîtresse de ce récepteur.
Elle reçoit les données du convertisseurs et effectue des opérations
nécessaires à l’extraction de l’information désirée. Ces opérations sont les
suivantes :
·
Démodulation
·
Ré-échantillonnage
·
Sélection du canal
La sélection du canal
concrétise la flexibilité d’un tel système. En effet, plusieurs canaux peuvent
être traités différemment ou simultanément, opération qui était impossible sur
une chaîne RF classique.
Actuellement, cette faculté de
simultanéité de traitement des canaux est utilisée dans certaines BTS. On peux
démoduler dans un même temps 8 canaux GSM [4]. Cette solution permet de
diminuer les coûts des BTS (une interface RF au lieu de 8) et leur complexités.
Voici la description d’une telle architecture :


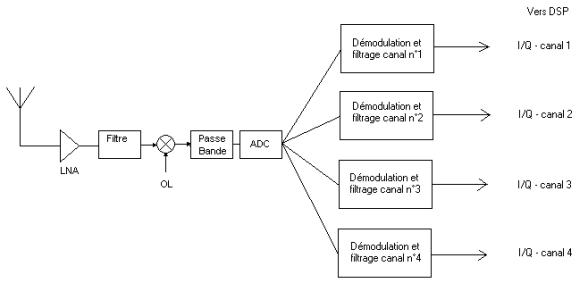
Fig. 7 : Architecture de réception
large bande pour une BTS.
Pour pouvoir faire fonctionner
plusieurs standards et ajouter de nouvelles fonctionnalités sur les mobiles et
les BTS, un remplacement ou une mise a jour du logiciel de traitement implanté
dans la chaîne Soft RF est nécessaire. Deux types de téléchargement sont
possibles [5]. Le premier est le cas nécessitant un transfert long et un débit
important. Pour cela, deux solutions sont envisagées : une liaison filaire
associée à une connexion sur un serveur spécialisé ou bien un chargement
préliminaire sur la carte USIM. Dans le cas de transferts courts (correction logiciel,
mise à jour…), une liaison radio sera établie.
Le software defined radio
semble beaucoup plus envisageable dans un avenir proche qu’une chaîne pure
« soft radio ». Mais dans le futur, d’autres architectures
« soft radio » pures pourrons être mises en œuvre [6]. Par exemple,
l’utilisation de CAN en parallèle ( augmentation de la fréquence
d’échantillonnage) et une mise en réseaux de plusieurs DSP ( DSP spécialisé
pour une tache donnée, mise en commun des puissances de calcul) pourront
permettre de numériser les signaux directement sur l’antenne. Ainsi, l’objectif
initial recherché par l’emploi des systèmes « soft radio » sera
atteint.
Conclusion
Après avoir étudié l’aspect RF
d’un terminal GSM bi-bande (GSM, DCS), nous avons constaté que la partie RF
classique ne pouvait en aucun cas répondre aux exigences d’une utilisation
universelle. Notre étude nous a donc dirigés vers des alternatives cherchant à
résoudre ces problèmes.
Dans un premier temps, nous avons
décrit les circuits programmables, c’est à dire des composants ayant la faculté
de pouvoir changer de propriétés à l’aide d’une tension de commande. Malgré son
adéquation avec la demande en mobile multi-standards, cette technique reste
relativement coûteuse et difficile à mettre en œuvre pour une application grand
public.
Cependant, cette solution n’est
pas la seule et il apparaît que le software radio semble être la solution la
plus adaptée à cette demande de mobile multi-bandes et multi-standards. Mais
actuellement, du fait de la limitation technique, le soft radio est peu
développé encore sauf pour les BTS où le besoin d’intégration est moins
important. Ces systèmes sont donc présents dans certaines BTS et dans un proche
avenir les progrès de la technique d’intégration pourront permettre d’implanter
de tels systèmes dans les terminaux mobiles.
Du fait de la co-existence de
plusieurs générations de réseaux mobiles, il semble que les constructeurs
s’attachent à l’étude de la radio logicielle mais, étant donné l’enjeu
économique, restent relativement discrets.
Annexe :
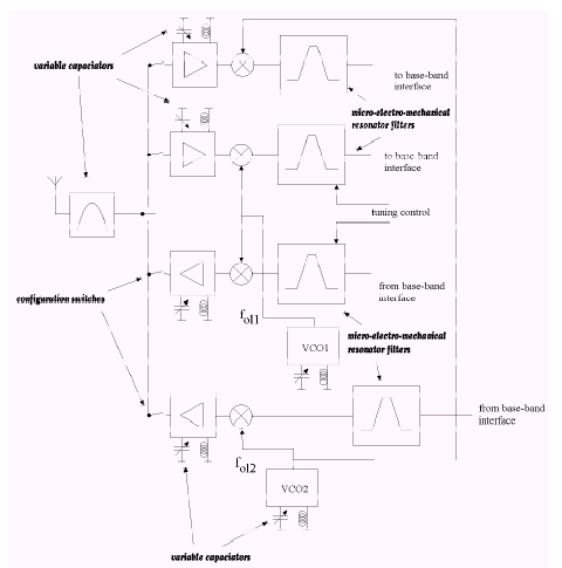
Composants MEMS dans une architecture de
récepteur RF multi-standard.
REFERENCES
[1] MULLER Jean-Philippe, “La structure du mobile GSM”,
http://www.ta-formation.com, Décembre 2000.
[2] KAISER Andreas, “The
potentials of MEMS components for re-configurable RF interfaces in mobile
communication terminals”, sujet de recherche à l’IEMN.
[3] HENTSCHEL Tim, HENKER Matthias, FETTWEIS
Gerhard, “The Digital Front-end of
Software Radio Terminals”, IEEE Personal Communications, p.40, Août
1999.
[4] BERTRAND Campagnie,
“Systèmes sans fil : vers une mutation de la chaîne radiofréquence”,
Electronique, n° 108, p.62, Novembre 2000.
[5] PALICOT Jacques, “La
radio logicielle est incontournable dans l’évolution des radiocoms”, propos
recueillis par Pierrick Arlot, Electronique International Hebdo, n° 452, p.5, 8 Novembre 2001.
[6] SALKINTZIS Apostolis k., NIE Hong,
MATHIOPOULOS P.Takis, “ADC and DSP, Challenges in the Development of Software
Radio Base Stations”, IEEE Personal Communications, p.47, Août 1999.
